

ABB 的 70EA04B-E (也称为 70EA04) 是一款模拟输入控制器模块
产品说明:
传感器信号处理:
处理来自机器人的关节位置编码器、速度传感器和力矩传感器的信号。
提供高精度的信号处理,确保数据准确性。
输入/输出接口:
提供多个传感器信号输入端口,用于连接位置编码器、速度传感器等。
可能还包括数字输入/输出端口,用于连接其他设备。
通信接口:
支持串行通信接口,用于与机器人控制器进行数据交换。
可能支持其他通信协议,如 CANopen 或 EtherCAT 等。
控制逻辑:
内置微处理器,用于执行控制逻辑和数据处理。
支持多种控制模式,如位置控制、速度控制等。
安全功能:
可能包括过载保护、过压保护等功能,确保系统的安全运行。
符合相关安全标准,如 ISO 13849 或 IEC 61800-5-2。
English manual:
Sensor signal processing:
Process signals from the robot's joint position encoder, speed sensor, and torque sensor.
Provides high-precision signal processing to ensure data accuracy.
Input/output interface:
Multiple sensor signal input ports are available to connect position encoders, speed sensors, etc.
Digital input/output ports may also be included for connecting other devices.
Communication interface:
Supports serial communication interface for data exchange with robot controller.
Other communication protocols may be supported, such as CANopen or EtherCAT.
Control logic:
Built-in microprocessor for performing control logic and data processing.
Support a variety of control modes, such as position control, speed control, etc.
Safety features:
It may include overload protection, overvoltage protection and other functions to ensure the safe operation of the system.
Comply with relevant safety standards such as ISO 13849 or IEC 61800-5-2.
产品视频展示:
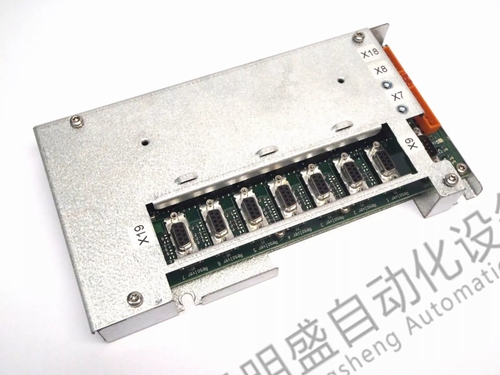
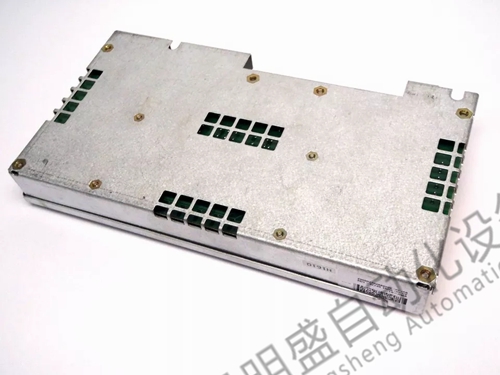
产品实物图片: