





近期,北京地方标准-VOCs走航监测和评价技术规范正式发布,本着分享和前瞻性研讨的原则,对该技术规范附带的编制说明做了部分摘录和简单延伸阅读,以飨读者。
挥发性有机物车载移动监测技术现状
目前挥发性有机物车载移动监测中主要依靠质谱类方法进行监测,对比传感器法及光学法而言,具有响应准确,灵敏性高,抗干扰强等优势,对比色谱法则有数据分辨率高的优势。具体技术路线分为软电离路线以及硬电离路线。软电离路线即通过分子离子定性,简单来说通过紫外灯能量激发或者质子转移技术等手段,实现让待测VOCs分子带电,进而进入质量检测器进行分离检测。软电离技术路线可以使未经过色谱分离的复杂的待测样品进行快速的定性定量分析。缺点是对于无法软电离为分子离子的VOCs无法开展检测,这使得其检测物质受限。
而硬电离路线一般为双通道并联构造,其中一路连接色谱,另一路直接采用质谱硬电离检测。在车载移动监测过程中一般只开启直接质谱检测通道,当发现浓度较高时,对问题点位开展色谱检测精细化分析。该技术路线优势是可以借助色谱,对问题点位开展准确精细化分析工作,但缺点是色谱分析需要时间较长,不适用于移动过程中的分析,而单质谱通道因为采用硬电离,得到的是多种物质碎片强度信息,无法对待测物质准确定性,定量效果也较差。整体来看现阶段挥发性有机物车载移动监测技术发展较快,但各技术之间均存在一定局限与不足,亟需相关规范统一及引导。
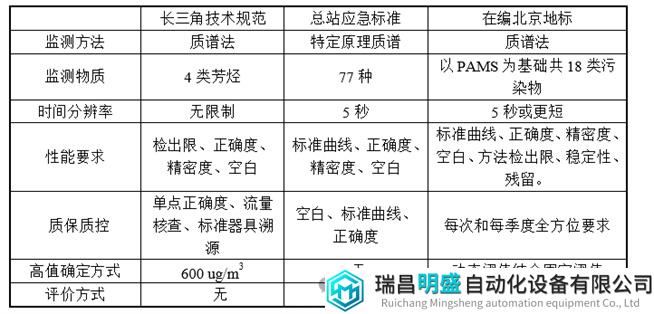
编制说明表7-1 主要相关标准基本情况
编制说明提到:本次技术规范相对于上述标准具有较大创新性,其主要体现在以下几个方面:
一是对VOCs目标化合物做了更细致的规定,相比于其他相关规范仅规定了部分芳香烃作为基本目标化合物,本文件规定了18类现有技术手段可以准确检测,且对环境影响较大的VOCs作为基本目标化合物,扩充后基本目标化合物加和得到的总挥发性有机物浓度能更好代表环境空气的实际情况。(小编注:随着含氧VOCs对臭氧贡献的重要性的认知日益提高,本次技术规范中在18类污染物中仅包含了两类含氧VOCs只能说是对走航仪器的最基本要求。后续提升出在于验证走航仪器对更多含氧VOCs,尤其是对分子量小于55且对臭氧贡献大的oVOCs(包含但不限于甲醛,乙醛,甲醇,乙醇,乙腈,丙烯腈,丁烯酮,或它们的同分异构体)的快速监测和准确定量能力。)
二是对车载移动监测仪器的时间分辨率进行了具体规定,对仪器的精准溯源能力进行了规范,以便于更好的服务车载移动监测工作。(小编注:长三角技术规范中‘每25米一套数据’间接对车载仪器时间分辨率(更准确来说,移动监测车整体响应时间)做了规定,当然这个与监测车辆行驶速度息息相关。但通常会被忽略的一点的是从移动监测车顶采样口到车载仪器进样口,样品在采样管路中的停留时间。现行移动监测车技术规范只是对车内采样管长度做了大致规定。一般车顶到车内的主采样管长度在3米左右,如因某些车载仪器采样方式限制,不能配备合适引流泵,样品在采样管内的停留时间会远远大于仪器的响应时间(本技术规范中为5秒或更短)。
基于VOCs移动监测这一特定课题和具体业务需求,小编觉得更加应该关注‘整车响应时间’,也就是样品在采样管内的停留时间和车载仪器响应时间之和。具体测量方式是从车顶进样口引入某个浓度标准样品到车载仪器上出现对应稳定信号的时间。例子请点击(我们来真的--Vocus PTR-TOF仪器响应时间现场展示)
三是在车载移动监测仪器的性能指标方面,相比现有相关规范补充了方法检出限、稳定性和残留等参数要求,能更好的保证数据质量。
四是目前尚无标准和技术规范对监测数据的评价方式作出规定,本文件创新了高值的确定方式,规定了按均值和高值两种评价方式对监测区域的挥发性有机物浓度开展评价,填补了国内相关领域的空白。(小编注:本次技术规范基于北京周边重点产业园区/集聚区的实测数据,对高值点规定尤其是评价方式的确立非常有借鉴意义。
针对高值点这个话题,基于移动监测车的测量经验和众多客户反馈,小编觉得‘当出现高值点,如何判别这是一次真实的测量,同时如何第一时间进行确认’这个看起来非常简单的问题也值得一论。
移动监测车在行驶过程中,一个污染点源恰好在车行驶轨迹的上风向不远处,大家可以想象的是,车载仪器信号会出现一个完整的信号上升,稳定,随后快速下降的这么一个过程,也就是相当于对污染点源在早期扩散过程中被做了一个剖面分析。这里的讨论其实大家可能也想到了,跟上面提到的‘整车响应时间’非常有关系。这是因为一般移动监测车的行驶速度在20-30 公里每小时,路边的这样一个污染点源留给仪器做记录的时间大概只有几秒钟。假设一台移动监测车因车载仪器时间分辨率所限(比如5秒或更长),且进样管路样品气体停留时间较长(比如10秒或者更长),那这样的瞬时污染点源在车载仪器电脑上只会留下一两个数值相对较高的数据点。在这里我们套用气相/液相色谱分析解谱中常用的概念:对一个色谱峰如需进行精确的定量分析,至少需要10个或者更多的数据点‘高密度’覆盖这个色谱峰。小编认为色谱解谱的这个认知也可以‘借用到’移动监测过程中如何对单个高值点进行高可靠性分析的问题上。这也对整车响应间(主要取决于车载仪器时间分辨率)提出更严苛的要求。当然这里的讨论不适用于多个相邻污染源或污染面源的场景。)
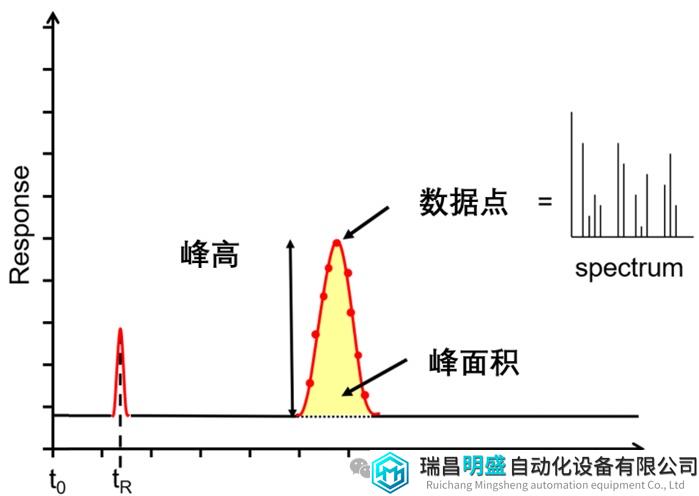
图1. 常规气相/液相色谱峰解析中一般需要多个数据点覆盖(来源于网络)
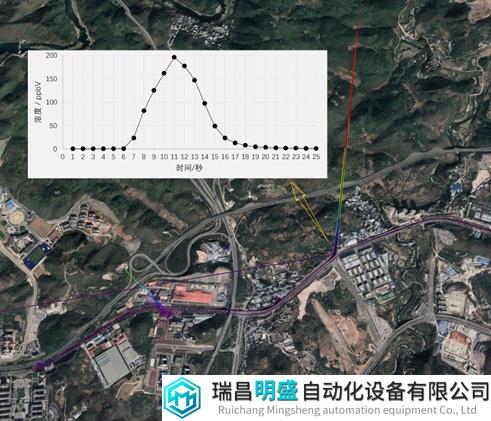
图2. 某次走航过程中Vocus PTR-TOF捕捉到的二甲苯浓度的瞬时时序变化
案例解析:在某次保障任务中,利用车载Vocus PTR-TOF质谱仪对某区域进行了连续走航监测,质谱仪采样频率为1秒/全谱。图2展示了某段走航轨迹上二甲苯浓度随时间变化图。可清楚看到,从第7秒开始测到污染,仪器信号从基线快速上涨,然后迅速下降,约第17秒仪器信号回归到初始基线水平。换句话说,此次污染事件共持续10秒,此过程中的仪器录得峰值浓度为196.4 ppbV,平均浓度为100.0 ppbv。如采用5秒或更慢的车载仪器采样频率,在10s的瞬时污染过程内获取到的污染数据点不足以完整还原出这个高值点完整升降变化过程。更重要的是,能否精确捕捉到高值点位污染气团的瞬时‘真实峰值’会打上一个问号。一方面是低时间分辨率低的车载仪器输出的浓度数值其实更等同于‘平均浓度’;另外气体样品如在采样管路内停留时间过长,其实也相当于瞬时高浓度事件因为扩散和稀释作用等被拉伸成了时间跨度更长的低浓度事件,而这发生在仪器分析之前。
上述文字只是小编一家之言,不妥及不完善处,权当抛砖引玉之用,在此希望各位读者和老师们多给予指导意见,一同进步!
稿件来源:TOFWERK
